Начало XX века ознаменовалось чрезвычайно активным развитием физики электромагнетизма. Вместе с открытием радиоволн появлялись и концепции первых радаров — устройств, позволяющих отслеживать положение объекта в реальном времени при помощи приема отраженных от него электромагнитных волн. Немного позже, во второй половине ХХ века, старт космической эры положил начало идеям о создании глобальной системы спутниковой навигации.
Но и это был только промежуточный этап эволюции навигационных систем. Современные эксперименты в области субатомных частиц сулят привнести в технологии ориентирования невиданный до сих пор уровень точности и прогнозируемости.
Изобретение гирокомпаса
До начала XX века морской хронометр все еще оставался наиболее точным средством навигации на флоте. В 1908 году была запатентована инновационная технология немецкого инженера-изобретателя Германа Аншютца-Кемпфе — гирокомпас. Чуть позже, в 1911 году, идею корабельного гирокомпаса Аншютц-Кемпфа реализовал Элмер Амброуз Сперри.

(Фото: Hagley Museum and Library)
источник: images.marinelink.com
Это было устройство с подвижными сферическими осями. Внутри оно заполнялось жидкостью, в которой размещался подвижный плавающий гироскоп. В основе функционирования гирокомпаса лежал принцип смещения его центра тяжести относительно четырех сторон света. При определении верного направления пути гироскоп фиксировался неподвижно и курс корабля рассчитывался согласно имеющимся табличным значениям.
Корабельный гирокомпас снабжался и компенсатором девиации — магнитной погрешности, вследствие которой значение магнитного севера не совпадало со значением реального, географического севера. Эта проблема решалась корректировкой по показателям широты и долготы, на которых в данный момент находилось судно.
Радиоволны, изменившие представление о навигации
Открытие свойств радиоволн в 1895 году заставило физиков задуматься о возможности их использования в области динамической навигации.
Одним из таких физиков был британец шотландского происхождения — Роберт Уотсон-Уотт. В 1935 году он презентовал миру свою первую практическую радарную систему, работавшую по принципу отправки и приема отраженных радиоволн. Система была способна не только обнаруживать присутствие объекта в исследуемой области, но и предоставляла данные о расстоянии до него, его размерах, а также помогала определить его скорость и вектор пространственного направления.
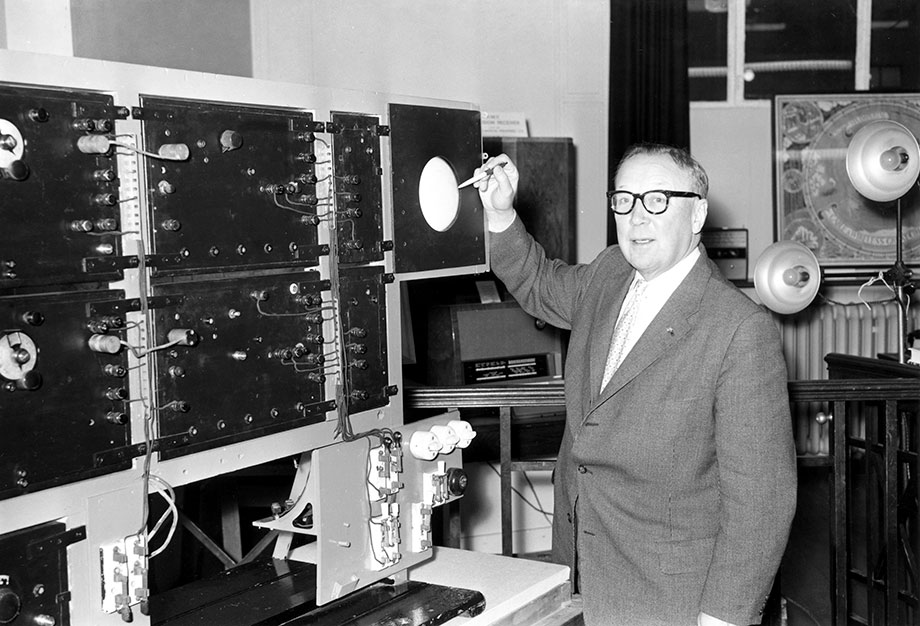
(Фото: Science Museum / SSPL)
источник: blog.sciencemuseum.org.uk
Следующим шагом в развитии радарных систем стала Loran (Long Range Navigation), спроектированная в США в период с 1940 по 1943 год. Loran — это гиперболическая навигационная система. В основе ее работы лежит принцип действия двух радарных станций: станции приема и станции передачи. Импульсный сигнал (от ведущей и ведомой станций) поступал на приемник, расположенный на борту корабля. После этого на электронно-лучевую трубку (ЭЛТ) информационного дисплея выводилась разница в задержке двух сигналов. Индикация световых импульсов на поверхности ЭЛТ-дисплея позволяла понять дистанцию до объекта и определить его размеры и вектор движения. Уровень погрешности Loran колебался в пределах от 100 м до 1 км.
Эта навигационная система успешно применялась во второй половине ХХ века на судах и подводных лодках, но имела довольно ограниченную зону покрытия, что в свою очередь влияло на быстродействие в момент поиска цели. Loran перестали использовать ближе к концу столетия, когда получили широкое распространение глобальные системы спутниковой навигации.
Спутниковая навигация: GPS и ГЛОНАСС
Активное развитие космоса в ХХ веке сыграло ключевую роль в построении глобальных навигационных систем позиционирования. Понимание основ эффекта Допплера помогло ученым определить вектор направления движения объекта по отношению к наблюдателю. Именно этот принцип лег в основу построения спутниковых систем навигации.
В 1973 году широкое распространение получила GPS (Global Positioning System) — система позиционирования, использующая созвездия спутников в качестве детекторов для определения положения объектов в пространстве. GPS заработала в 1978 году, когда на орбиту была запущена первая группировка спутников, состоявшая из 11 космических аппаратов.
Сигнал с них поступал на приемные станции, расположенные на Земле, и в режиме реального времени давал полную навигационную картину касательно объектов, подключенных к системе. GPS, так же, как и Loran, функционирует по принципу временной разницы между сигналами, поступающими на приемную станцию с разных спутников, синхронизированных между собой во времени.
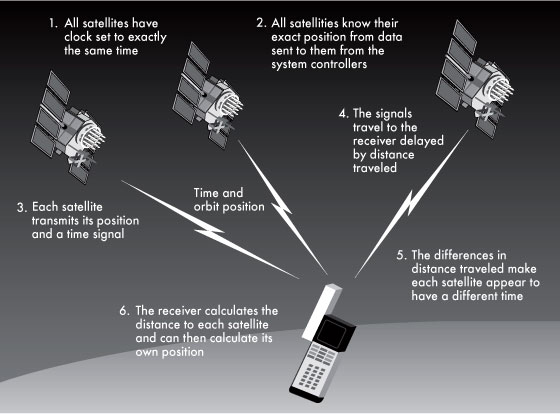
источник: mason.gmu.edu
Чем больше спутников задействуется в этом процессе, тем точнее работает система глобального позиционирования. В настоящий момент созвездие GPS состоит из 24 спутников, что обеспечивает погрешность позиционирования в пределах 10 м.
Стоит отметить, что GPS — только одна из существующих систем спутниковой навигации. На сегодняшний день схожие по функционалу системы глобальной навигации имеют такие страны, как Россия (ГЛОНАСС), Китай (BeiDou) и ЕС (Galileo).
С активным внедрением смартфонов возросло и повсеместное использование глобальных спутниковых навигационных систем. Современные смартфоны могут работать сразу с несколькими из них, что позволяет их пользователям беспрепятственно путешествовать по всему миру. В настоящее время большинство систем спутникового позиционирования перешли из государственной сферы эксплуатации в частный сектор, что положительно сказалось на их развитии.
Квантовая акселерометрия и возможное будущее систем ориентирования
В основе инновационной технологии ориентирования по квантовым гироскопам и акселерометрам лежит процесс атомарной интерферометрии. Это явление достигается путем охлаждения атомов вещества до состояния, незначительно превышающего состояние абсолютного нуля температуры (минимального температурного предела, который может иметь физическое тело во Вселенной).
Если воздействовать на ультраохлажденные атомы пучками фотонов (светом лазера), они смогут достичь состояния суперпозиции — особого свойства частиц, при котором они приобретают сразу две пространственные координаты: движущуюся и статическую (принимая свойства волновой функции, при этом оставаясь в состоянии частицы).
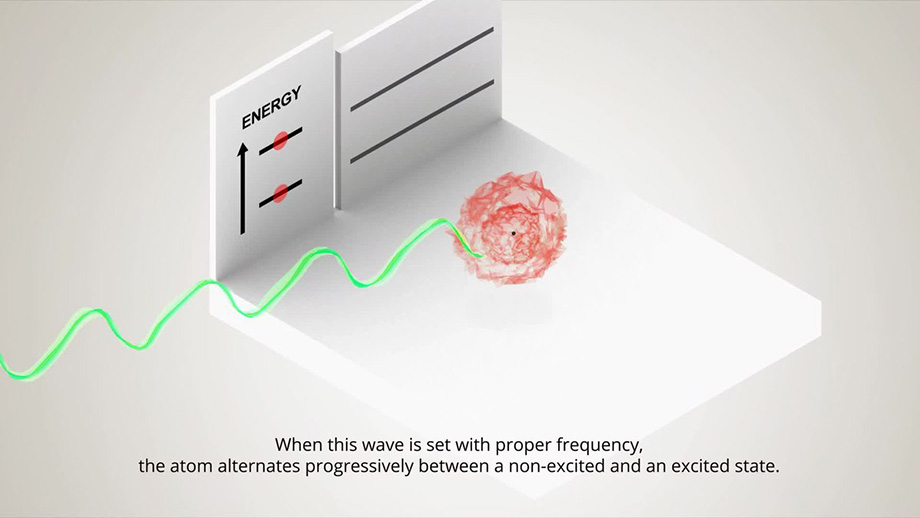
источник: en.wikipedia.org
В инженерном смысле это означает потенциальную возможность создания автономной системы навигации, которая будет мгновенно получать информацию об изменении положения объекта (или массива объектов) в пространстве. То есть топографическое состояние ландшафта будет в полном смысле этого слова динамическим и отображать всю PTN-картину (Position, Timing & Navigation) объектов, находящихся в зоне покрытия, в режиме реального времени.
Потенциально, данная технология может стать альтернативой GPS, поскольку лишена ее главного минуса — задержки сигнала, вызванной временем, за которое он отражается с орбиты на Землю.
Сегодня основные эксперименты в области систем квантовой навигации проводятся в Национальной лаборатории Сандии (Sandia National Laboratories, SNL). Созданный командой ученых квантовый сенсор успел пройти испытание временем (прибор бесперебойно функционирует уже более полутора лет) и показывает удивительные результаты в области прогнозирования топологии ландшафта и навигации объектов в нем. Предполагается, что данную технологию можно будет использовать в системах навигации дронов, а также в областях, где потеря GPS-сигнала будет нести критические последствия (авиация и судоходство).
Свой прототип квантового акселерометра удалось создать и группе ученых из Императорского колледжа в Лондоне. Англичане размышляют и о возможностях гравитационного маппинга, в котором по схожему принципу квантовой интерферометрии будет сканироваться почва Земли, а после — осуществляться поиск минералов и других полезных ископаемых при помощи создания интерактивных 3D-карт залежей ресурсов.
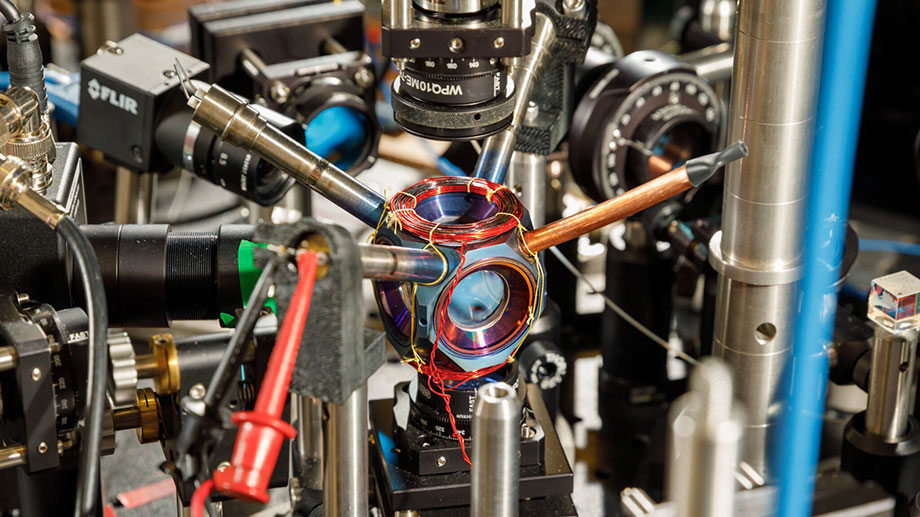
(Фото: Bret Latter)
источник: sites.breakingmedia.com
Какие бы новые навигационные решения ни появились в будущем, сегодня проблематика самостоятельного ориентирования на местности вышла из зоны внимания современного человека. Глобальные системы спутниковой навигации функционируют в каждом смартфоне, строят маршрут автономно и не требуют от человека понимания всех технологических нюансов этого процесса. Технологии квантового маппинга обещают привнести в эту область еще больше запутанности, вместе с тем выведя точность навигационных систем на качественно новый уровень.