Недавно стало известно о планировании совместной космической миссии американской компании Starfish Space и итальянской D-Orbit. По замыслу, два космических аппарата — Otter Pup 2, разработанный Starfish Space, и ION от D-Orbit — будут выведены на орбиту, где продемонстрируют маневр орбитального сближения (рандеву), который должен завершиться стыковкой. Возможно, эта новость так и прошла бы незамеченной среди многих других запланированных космических миссий, если бы для этой демонстрации компании не выбрали кардинально новый технологический подход в стыковке — впервые для этого воспользуются специальным электростатическим механизмом вместо обычного механического шлюза, изобретенного еще в прошлом веке.
И если вы тоже свыклись с мыслью, что орбитальное рандеву и стыковка — давно уже базовые для космической деятельности, а весь настоящий космический hi-tech успели захватить механические манипуляторы-мехазиллы от SpaceX (именно они ловят в вертикальном положении многоразовый бустер SuperHeavy), мы подготовили для вас неожиданный материал. Гарантируем, вас удивит, насколько титанические усилия кроются за, казалось бы, обычными орбитальными маневрами.
Встреча на первой орбитальной скорости: важность орбитального рандеву
Маневры орбитального приближения и стыковки — это два последовательных мероприятия, основа любой космической деятельности, требующей объединения двух или более космических аппаратов. Ни одна логистическая космическая миссия, доставка экипажей, обслуживание, строительство, заправка и ремонт не обходятся без этих двух маневров.
Орбитальное рандеву — процесс, во время которого два или более космических аппаратов на орбите сближаются между собой. Это не просто «встреча» в космосе. Это точный, контролируемый маневр, требующий расчета траекторий, скоростей и времени, ведь на низких орбитальных высотах все происходит на первой космической скорости в 7,8 км/с, а на средней и геостационарной орбитах аппараты разгоняются до 3-4 км/с.
Необходимость орбитального рандеву была очевидной, едва человечество начало задумываться над космической деятельностью. Отец баллистических ракет, Вернер фон Браун, указывал на важность этого орбитального маневра в своих трудах об орбитальных станциях, датированных серединой 50-х годов прошлого столетия. Уже тогда ему было очевидно, что даже самые мощные ракеты-носители не смогут выводить на орбиту монолитные конструкции таких тяжелых объектов, как орбитальная станция, и весь процесс ее модульной сборки следует переносить в космическое пространство.
Позже, в середине 1960-х, когда космические полеты стали достижимой реальностью, NASA воплотило космическую программу Gemini — своеобразную подготовку к пилотируемому полету американцев на Луну во время миссий Apollo. Но, кроме тестирования возможностей космического корабля, одной из главных причин проведения в 1965-1966 годах серии космических миссий Gemini стало именно освоение основных методов орбитального рандеву.
Первое успешное орбитальное приближение датировано декабрем 1965 года, когда космический корабль Gemini 6A, пилотируемый Фрэнком Борманом и Джимом Ловеллом, сумел догнать на орбите Gemini 7 под управлением Уолтера Ширра и Томаса Стаффорда. Космические корабли выполнили контролируемое сближение, во время которого минимальная дистанция между ними составила меньше метра. Такой показатель приближения удалось поддерживать в течение нескольких часов. Жизнеспособность концепции была официально доказана. Итак, далее поговорим о теории.

Источник: wikimedia.org
Любое орбитальное рандеву начинается с этапа планирования вывода на орбиту. Чаще всего космический аппарат, с которым предстоит произвести стыковку, уже находится на околоземной орбите (например, орбитальная станция МКС), а другой запускается с Земли. Самой сложной частью в этом процессе считается стадия фазирования и сближения, когда космический аппарат, подбираясь к объекту стыковки, осуществляет серию зажиганий своих маневренных двигателей (импульсное зажигание), чтобы выйти на заданную орбиту. Постоянный контроль относительной скорости и положения приближающегося космического аппарата на этом этапе играет самую главную роль, поскольку любая ошибка в расчетах или выполнении маневра грозит столкновением либо промахом.
Чтобы догнать объект, космический аппарат использует контринтуитивный принцип орбитальной механики. Это один из удивительных парадоксов орбитального рандеву, ведь, чтобы догнать объект на определенной орбите, космическому аппарату, который его преследует, следует выполнить маневр торможения (так называемый тормозной импульс). Резкое снижение скорости приведет к уменьшению орбиты аппарата, а как известно, на более низких орбитах объект ускоряется под воздействием гравитационного поля Земли. То есть, догоняющий космический аппарат за ту же единицу времени будет способен выполнить больше околоземных оборотов, чем объект на орбите повыше.
Итак, согласно контринтуитивному принципу орбитальной механики, для того чтобы догнать объект, с которым предстоит провести стыковку, надо подбираться к нему с более низкой орбиты. Именно поэтому все орбитальные приближения происходят снизу вверх, а не наоборот. Не только потому, что сам запуск осуществляется с Земли, но и учитывая базовые принципы орбитальной механики. По аналогичному принципу выполняется и контролируемое «отставание» от объекта преследования — вдруг по каким-то причинам один аппарат обогнал другой, с которым надо было стыковаться, ему надлежит увеличить собственную скорость путем импульсного зажигания двигателей. Таким образом он поднимется на более высокую относительно своего объекта преследования орбиту и дождется, пока тот его опередит, чтобы снова «упасть» на орбиту ниже и повторить предыдущий этап контролируемого приближения.
Когда до цели стыковки останутся десятки или сотни километров, корабль-преследователь приступит к подготовке к терминальной фазе приближения (Terminal Phase Initiation). Это последний большой маневр сближения, когда выбирается финальная орбитальная траектория, которая должна привести к встрече на одинаковой орбитальной высоте.
Терминальная фаза приближения сопровождается этапом синхронизации орбит обоих космических аппаратов. Для точной навигации на этом этапе, в частности, привлекаются спутниковые навигационные системы (GPS, Galileo, Beidou или ГЛОНАСС), ресурс которых всегда дополняется системами радиолокации и лазерными дальномерами. А на поздних этапах полезны и визуальные данные с оптических камер наблюдения снаружи космического аппарата.
Финальные этапы орбитального рандеву, когда до объекта стыковки остаются сотни и десятки метров, предусматривают выравнивание относительной скорости между космическими аппаратами. В идеальном сценарии приближения относительная скорость должна достигать нулевого значения. После выхода на целевое расстояние начинается этап удержания позиции (Station-keeping), во время которого важно придерживаться постоянного относительного расстояния и ориентации космических аппаратов. Это финальный этап орбитального рандеву — космические аппараты готовятся к его конечной цели, стыковке, образуя монолитное соединение двух или большего количества космических аппаратов на орбите.
Первый опыт: безопасные и не очень связки на орбите
Орбитальная стыковка (Docking) — следующий этап после рандеву, завершающийся физическим соединением космических аппаратов. Различают несколько основных типов стыковки. В частности, это мягкая швартовка, когда один аппарат захватывается роботизированной рукой и подтягивается к другому, и жесткая стыковка, когда аппараты с помощью специальных устройств механически объединяются герметизацией. Недавние наработки включают разработку новых технологических подходов и стандартов стыковки, например, основанных на явлении электромагнетизма.
Первая орбитальная стыковка пилотируемого космического корабля с автоматизированным аппаратом состоялась в марте 1966 года во время миссии Gemini 8. Корабль, который пилотировали Нил Армстронг и Дэвид Скотт, смог осуществить контролируемое приближение и первую в истории стыковку в космосе с беспилотной ракетой-мишенью Agena.
Едва очнувшись от эйфории после первого успеха, астронавты заметили аномалию: из-за неисправности двигателя космического корабля началось неконтролируемое вращение связки Gemini—Agena. Образовалась адская центрифуга, которая и побудила экипаж корабля принять решение об экстренном разъединении с Agena. Этот процесс проходил в мануальном режиме через систему рулевого управления. Когда удалось отсоединиться от Agena, Gemini 8 совершил аварийную посадку. К счастью, его экипаж остался невредимым, вот только привкус от первой успешной орбитальной стыковки был горьким.

Источник: nasa.gov
В октябре 1967 года первые успехи в орбитальной стыковке продемонстрировал и Советский Союз — состоялась автоматическая стыковка двух космических аппаратов: «Космос-186» и «Космос-188». Уже спустя полтора года СССР укрепил этот успех первой в истории орбитальной стыковкой двух пилотируемых космических кораблей.
Сначала 14 января 1969 года в космос отправился «Союз-4», который пилотировал космонавт Владимир Шаталов. Через день после него на орбиту добрался «Союз-5» с тремя членами экипажа: командиром Борисом Волыновым, бортовым инженером Алексеем Елисеевым и инженером-исследователем Евгением Хруновым. «Союз-4» был активным кораблем, то есть он выполнял стыковку, а «Союз-5» играл роль пассивного космического аппарата. 16 января 1969 года «Союз-4» осуществил автоматическое приближение к «Союзу-5». Когда до объекта стыковки осталось всего 100 м, Владимир Шаталов взял космический корабль под ручное управление, после чего провел финальный этап приближения и стыковку. Так и была создана первая в мире обитаемая орбитальная станция.
Историческая стыковка и разъединение «Союз-4» и «Союз-5»:
Космические корабли пробыли в связке в течение 4 часов и 35 минут. За это время состоялся невероятный весьма рискованный этап миссии — пересадка космонавтов с одного корабля на другой. Здесь, наверное, можно задаться вопросом: ну, что сложного в том, чтобы перебраться через люк с одного корабля на другой? Конечно, недоумение было бы логичным, если бы у тогдашних советских «Союзов» этот переходный люк существовал. Но это было отнюдь не так — переходить с одного корабля на другой космонавтам пришлось через открытый космос. Для этого Алексей Елисеев и Евгений Хрунов, одетые в скафандры «Ястреб», на протяжении 37 минут медленно двигались вдоль внешней поверхности космических кораблей, держась за предусмотрительно установленные конструкторами поручни. В конце концов для обоих путешествие успешно завершилось.
Удивительно, но страна, чтобы провести одну из самых сложных на начало 1969 года космических миссий (до запуска Apollo 11 оставалось еще около полугода), действительно решила рискнуть жизнью двух космонавтов, вместо того чтобы потратить время на проектирование переходного люка. С другой стороны, здесь важно не терять контекст и помнить, что космическая гонка между СССР и США была прежде всего соревнованием, в котором вопрос безопасности космических экипажей был второстепенным. Весьма вероятно, что проектирование подобного переходного люка привело бы к задержке миссии и никогда бы не позволило СССР стать первым в презентации орбитальной стыковки двух пилотируемых космических кораблей. Тогда каждая из таких космических демонстраций имела свой риск и свою цену, которую две космические державы, конкурируя, не колеблясь платили в кратчайшие сроки.
Крепкие объятия: разновидности стыковочных механизмов и будущее развитие технологии
Давайте поговорим о том, что обеспечивает надежность орбитальной стыковки, ведь именно от этих механизмов зависит безопасность экипажа и грузов. Различают несколько основных механизмов для жесткой стыковки. Мы приведем их в хронологическом порядке внедрения:
- Зондово-конусный (Probe-and-Drogue) — это первый из разработанных механизмов для орбитальной стыковки, который был применен, в частности, на первых пилотируемых космических кораблях: советском «Союзе» и американском Apollo. Принцип действия зондово-конусного механизма базируется на взаимодействии всего двух частей. Активная представлена зондом со специальным штоком на конце, который выступает механизмом захвата. А пассивная часть оснащается конусообразным отверстием, в которое для соединения должен попасть активный зонд. На начальном этапе захвата активный зонд входит в пассивный конус, после чего его зажимы цепляются за выступы внутри отверстия и прочно соединяются с ними. Далее специальная лебедка (иногда с помощью маневренных двигателей) мягко притягивает космические аппараты друг к другу, соединяя их. В момент максимального сближения происходит жесткое замыкание: специальные механизмы (защелки, крюки, замки) фиксируют стыковочные порты обоих кораблей, обеспечивая их механическое соединение. Затем герметизацией выравнивается давление в шлюзе для безопасного передвижения экипажа или транспортировки грузов.

Источник: i.sstatic.net
- Андрогинный периферический стыковочный механизм (Androgynous Peripheral Attach System, APAS) — современный гибкий тип стыковочного механизма. «Андрогинный» в его названии означает, что оба стыковочных узла одинаковы и могут играть как активную, так и пассивную роль. Здесь нет отдельного зонда и конуса; каждый порт может принимать или быть принятым. «Периферический» означает, что механизмы замыкания расположены по периметру стыковочного порта. Во время конечного этапа приближения один порт выдвигает свои «лепестки», которые захватывают аналогичные «лепестки» или «кольцо» другого порта, после чего происходит автоматизированное выравнивание обоих космических аппаратов с помощью сервоприводов или гидравлических систем. Когда оба модуля максимально прижаты друг к другу, начинается этап жесткого замыкания: замки по периметру активируются, прочно фиксируя сжимающие порты вместе, далее следует герметизация. APAS зарекомендовал себя как наиболее универсальный стыковочный механизм, ведь любой аппарат с таким портом может стыковаться с другим аппаратом с таким же портом, что значительно упрощает планирование миссий и дает космическим компаниям большую гибкость. Периферическое расположение механизмов также позволяет сделать больший люк, что действительно важно для экипажа в условиях космоса и помогает переносить через шлюз габаритные грузы. Пик использования APAS пришелся на 1980-е и 1990-е годы, когда ими оснащали американские космические шаттлы. А с 2000 года подобные устройства начали соединять между собой модульную конструкцию орбитальной станции МКС (в частности APAS-89/95).

Источник: wikimedia.org
- Стыковочные механизмы, основанные на стандартах NDS/IDSS (International Docking System Standard). Сейчас это новейший международный стандарт стыковочных механизмов, разработанный для совместимости между космическими кораблями разных стран и компаний в будущем. Это прямое развитие андрогинных периферических систем, использующее новые технологические подходы, повышенную безопасность и надежность соединения. NDS/IDSS-совместимый стыковочный стандарт применяется на космических кораблях SpaceX Crew Dragon, и на долгострое Boeing Starliner. Лунный космический корабль NASA тоже будет иметь стыковочный узел, совместимый с NDS/IDSS.
- Магнитные или электромагнитные системы — наиболее новаторский подход в орбитальной стыковке, предусматривающий применение контролируемых магнитных полей для взаимодействия между двумя космическими аппаратами для их соединения. Для этого предстоит задействовать постоянные магнитные пластины, электромагнитные пластины или вихревые токи (эдди-токи). Это первая в истории не механическая разновидность орбитальной стыковки, которую предлагается разработать. А значит, электромагнитные стыковочные системы не будут подвержены механическому износу, что происходит с приведенными выше типами механизмов. Этап начального сближения будет по-прежнему происходить с помощью обычных маневренных двигателей. Но когда космические аппараты окажутся на расстоянии нескольких метров друг от друга, активируются электромагниты, которые образуют между ними управляемое магнитное поле. Сначала это поле выровняет и синхронизирует вращение космических аппаратов относительно друг друга, а затем поспособствует их мягкой стыковке. Основное преимущество, гарантирующее повышенную мягкость стыковки, заключается в самой физике электромагнетизма — если скорость приближения будет слишком высокой, электромагниты создадут эффект демпфирования, используя вихревые токи для торможения. Несмотря на то, что приближение будет происходить благодаря взаимодействию с магнитным полем, конечное удержание по-прежнему будут обеспечивать механические замки (подобные тем, что на APAS или NDS).
Сейчас электромагнитные системы для стыковки — на финальном этапе разработки. Вскоре их должны продемонстрировать частные космические компании — например, совместная миссия D-Orbit и Starfish Space, о которой мы рассказывали выше, как раз может войти в историю как первая демонстрация подобного типа стыковки.

Источник: spacenews.com
Использование электромагнитных сил в будущих космических миссиях поможет существенно удешевить производство стыковочных узлов и обеспечить более мягкий захват космических аппаратов с возможностью дистанционного управления процессом. Сейчас новая технология гарантирует не только много преимуществ, но и прогнозируемо сталкивается с рядом трудностей. Среди них ключевые: большое потребление энергии, сложность реализации и экранирование других электрических систем космического корабля, ведь длительное воздействие сильных магнитных полей грозит вывести из строя его электрооборудование. Совсем скоро мы выясним, удалось ли справиться с этими вызовами D-Orbit и Starfish Space.
Космическая рука помощи: роботизированные манипуляторы для мягкой стыковки
Рассмотренные выше стыковочные механизмы и новые типы электромагнитных стыковочных систем проектировались для жестких типов стыковки, когда два космических аппарата прочно соединяются замками и герметизируют давление, делая пространство внутри безопасным для передвижения экипажа. Однако существуют космические аппараты без собственных стыковочных портов, поэтому для их захвата оптимальны методы мягкой стыковки, прежде всего с привлечением роботизированных манипуляторов.
Внешняя роботизированная рука-манипулятор, которую чаще всего можно увидеть на орбитальных станциях, захватывает космический аппарат и перемещает его к специальному стыковочному порту, где осуществляется жесткая фиксация. В отличие от жесткой стыковки, когда оба космических аппарата постоянно маневрируют, такой тип мягкого присоединения в основном называют орбитальной швартовкой (Berthing). Подобный процесс по своей сути менее динамичный, ведь присоединяемый космический аппарат пассивен и полностью зависит от внешней роботизированной руки.
Первой роботизированной рукой-манипулятором стала Canadarm (Shuttle Remote Manipulator System, SRMS), разработанная Канадой. Canadarm впервые испытана в космосе на борту шаттла Columbia во время миссии STS-2 в ноябре 1981 года. Рука протяженностью около 15,2 м состояла из шести суставов, что обеспечивало шесть степеней свободы движения. Манипулятор имел на конце эффектор (End Effector) — механизм, способный захватывать полезные грузы, на которых заранее установили для этого специальные крепления.
На раннем этапе разработки управление манипулятором происходило в ручном режиме оператором-астронавтом, использовавшим камеры на руке и собственные визуальные подсказки для захвата объекта. После захвата Canadarm либо выводила космический аппарат из грузового отсека челнока (в случае развертывания), либо туда его возвращала. Canadarm сыграла решающую роль на начальном этапе строительства МКС. Именно ею перемещали большие модули и фермы из грузового отсека шаттла. Иногда работали сразу две роботизированные руки (Canadarm и Canadarm2).

Источник: wikimedia.org
За годы работы доставленная на МКС в апреле 2001 года Canadarm2 — новая, более длинная (17,6 м) модификация первого манипулятора на семи подвижных суставах — помогла захватить такие типы беспилотных космических кораблей, как японский HTV (H-II Transfer Vehicle), американский SpaceX Dragon первого поколения, а также Northrop Grumman Cygnus. После захвата манипулятором грузовые корабли переносили в специальную зону под названием Common Berthing Mechanism (CBM), где 16 автоматических моторизованных болтов прочно прижимали их к внешнему корпусу станции, обеспечивая жесткую герметичную швартовку. Позже серию манипуляторов Canadarm дополнила третья модификация с похожим функционалом.
В 2008 году Япония также развернула на МКС свою собственную роботизированную руку-манипулятор — JEMRMS (Japanese Experiment Module Remote Manipulator System). Установленная на японском экспериментальном модуле Kibo, в отличие от предшественников, JEMRMS была системой сразу из двух роботизированных рук: главная была длиной 9,9 м, а малая — 1,7 м. Первая рука использовалась для захвата и работы с габаритными объектами, тогда как у меньшей показатель точности был повыше, поэтому ее привлекали к работе с малыми объектами, что требовало ювелирного мастерства.

Источник: wikimedia.org
Роботизированные JEMRMS никогда не швартовали большие космические корабли к МКС, зато они перемещали экспериментальные платформы и отдельные эксперименты из герметичного модуля Kibo на его внешнюю платформу — Exposed Facility.
Последняя из установленных на МКС роботизированных рук была развернута в июле 2021 года. European Robotic Arm (ERA), имея длину 11,3 м и семь подвижных суставов, остается единственной рукой, способной обслуживать российский сегмент орбитальной станции. Новаторство ERA заключается еще и в том, что это единственный роботизированный манипулятор, который может перемещаться по внешней поверхности станции, закрепляясь в 11 базовых точках фиксации по требованию оператора. ERA также является универсальной рукой, поскольку оба ее «запястья» с разных сторон обладают одинаковой функциональностью и могут быть как конечными эффекторами, так и местами крепления к поверхности МКС.
Стоит отметить, что сегодня активно разрабатываются новые типы роботизированных манипуляторов, направленные на повышенный уровень автономности благодаря привлечению алгоритмов машинного обучения в процесс их функционирования. ИИ позволит роботам принимать решения в реальном времени относительно последовательности действий, выбора инструментов и реагирования на непредвиденные ситуации. Сейчас подобные наработки представлены японским стартапом GITAI, который уже тестирует автономные двурукие системы (S2 на МКС). Предполагается, что функционал разработки выйдет далеко за пределы МКС и может быть установлен на сервисные космические аппараты, которые будут заниматься обслуживанием, дозаправкой и модификацией спутников на орбите.
В рамках расширения функционала роботизированных манипуляторов сейчас предлагается создание новых манипуляторов с повышенной ловкостью и умением работать с мелкими деталями, выпуск модульных и реконфигурируемых рук вроде ERA на МКС. Есть и наработки в сфере мягкой робототехники (Soft robotics) — речь о новых типах роботов из гибких материалов и структур, а также проектировании небольших роботизированных манипуляторов-помощников, так называемых коботов (коллаборативные роботы). Последний тип будет крайне незаменимым в колонизаторских миссиях на другие планеты, когда роботизированные руки будут работать в прямой связке с астронавтом-человеком для помощи в строительстве и других типах рутинных задач.
Proba-3: орбитальное рандеву продолжительностью два года
Как говорилось выше, обычно орбитальное рандеву завершается стыковкой двух космических аппаратов. Однако существуют космические миссии специфического профиля, которые для определенных задач требуют от космических аппаратов постоянно пребывать в состоянии рандеву — на одинаковом расстоянии друг от друга.
Именно так работает солнечная обсерватория Proba-3, организованная и запущенная Европейским космическим агентством (ESA) в мае 2024 года. Эта космическая миссия состоит из двух аппаратов на высокой эллиптической орбите (HEO). Один из них, коронографный спутник (Coronagraph Spacecraft), оснащен главным научным инструментом миссии — коронографом для исследования Солнца. Другой, так называемый затмевающий спутник (Occulter Spacecraft), служит для постоянного искусственного затенения, чтобы коронограф не слепил прямой солнечный свет. Для этого его оборудовали специальным диском, который и блокирует свет от Солнца, имитируя солнечное затмение.
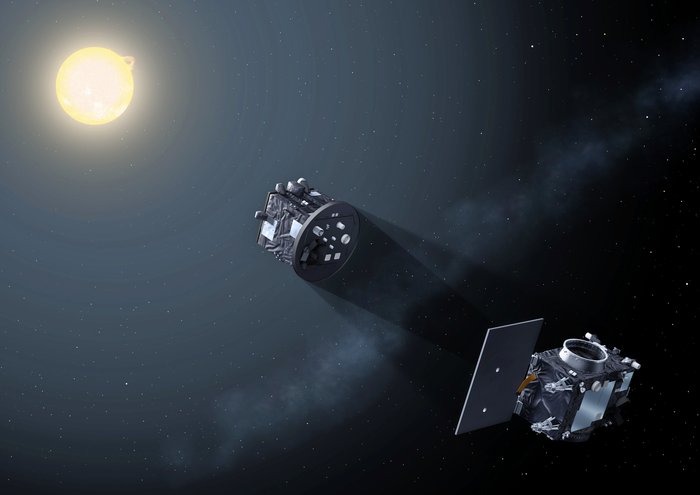
Источник: spaceflightnow.com
Для того чтобы затмение всегда было полным, спутникам следует быть на неизменном расстоянии друг от друга (144 м/с). Это состояние постоянного орбитального рандеву, в котором находятся оба спутника, требует от команды миссии Probe-3 сверхчувствительных приборов космической навигации, позиционирования и времени. Номинальная продолжительность эксперимента Proba-3 составляет два года, но, как это часто происходит с удачными космическими миссиями, ее могут продлить.
Хотя существуют и другие миссии, которые используют внутренние коронографы, а также миссии с несколькими космическими аппаратами, наблюдающими Солнце с разных углов (SOHO, STEREO), Proba-3 уникальна именно благодаря двум отдельным аппаратам в устойчивом прецизионном рандеву. Она наглядно демонстрирует, что орбитальное рандеву остается одним из самых весомых аспектов космической деятельности не только в вопросе орбитального строительства и логистики, но и в научных исследованиях.