Нещодавно стало відомо про планування спільної космічної місії американської компанії Starfish Space та італійської D-Orbit. За задумом, два космічні апарати — Otter Pup 2, розроблений Starfish Space, та ION від D-Orbit — будуть виведені на орбіту, де продемонструють маневр орбітального наближення (рандеву), який має завершитися стикуванням. Можливо, ця новина так і лишилася б непоміченою серед багатьох інших запланованих космічних місій, якби для цієї демонстрації компанії не обрали кардинально новий технологічний підхід у стикуванні — вперше для цього скористаються спеціальним електростатичним механізмом замість звичайного механічного шлюзу, який винайшли ще в минулому столітті.
І якщо ви теж звикли до думки, що орбітальне рандеву та стикування — давно вже базові для космічної діяльності, а увесь справжній космічний hi-tech встигли захопити механічні маніпулятори-мехазілли від SpaceX (саме вони ловлять у вертикальному положенні багаторазовий бустер SuperHeavy), ми підготували для вас несподіваний матеріал. Гарантуємо, вас здивує, наскільки титанічні зусилля криються за, здавалось би, звичайними орбітальними маневрами.
Зустріч на першій орбітальній швидкості: важливість орбітального рандеву
Маневри орбітального наближення та стикування — це два послідовні заходи, основа будь-якої космічної діяльності, що потребує об’єднання двох або більше космічних апаратів. Жодна логістична космічна місія, доставка екіпажів, обслуговування, будівництво, заправка й ремонт не оминають цих двох маневрів.
Орбітальне рандеву — процес, під час якого два або більше космічних апаратів на орбіті зближаються між собою. Це не просто “зустріч” у космосі. Це точний, контрольований маневр, що вимагає розрахунку траєкторій, швидкостей і часу, адже на низьких орбітальних висотах усе відбувається на першій космічній швидкості у 7,8 км/с, а на середній і геостаціонарній орбітах апарати розганяються до 3-4 км/с.
Необхідність орбітального рандеву була очевидною, щойно людство почало замислюватися над космічною діяльністю. Батько балістичних ракет, Вернер фон Браун, вказував на важливість цього орбітального маневру у своїх працях щодо орбітальних станцій, датованих серединою 50-х років минулого сторіччя. Вже тоді йому було очевидно, що навіть найпотужніші ракети-носії не зможуть виводити на орбіту монолітні конструкції таких важких об’єктів, як орбітальна станція, і весь процес її модульної збірки слід переносити у космічний простір.
Пізніше, у середині 1960-х, коли космічні польоти стали досяжною реальністю, NASA втілило космічну програму Gemini — своєрідну підготовку до пілотованого польоту американців на Місяць під час місій Apollo. Та, окрім тестування можливостей космічного корабля, однією з головних причин проведення у 1965-1966 роках серії космічних місій Gemini стало саме освоєння основних методів орбітального рандеву.
Перше успішне орбітальне наближення датоване груднем 1965 року, коли космічний корабель Gemini 6A, пілотований Френком Борманом і Джимом Ловеллом, зміг наздогнати на орбіті Gemini 7, яким керували Волтер Ширра та Томас Стаффорд. Космічні кораблі виконали контрольоване наближення, під час якого мінімальна дистанція між ними становила менше метра. Такий показник наближення вдалося тримати протягом кількох годин. Життєздатність концепції була офіційно доведена. Отже, далі поговоримо про теорію.

Джерело: wikimedia.org
Будь-яке орбітальне рандеву починається з етапу планування виведення на орбіту. Найчастіше космічний апарат, з яким належить провести стикування, вже перебуває на навколоземній орбіті (наприклад, орбітальна станція МКС), а інший запускається з Землі. Найскладнішою частиною у цьому процесі вважається стадія фазування та наближення, коли космічний апарат, який прямує до об’єкта стикування, здійснює серію запалень своїх маневрених двигунів (імпульсне запалювання), щоб вийти на задану орбіту. Постійний контроль відносної швидкості та положення космічного апарата, що наближається, відіграє на цьому етапі найголовнішу роль, оскільки будь-яка помилка в розрахунках чи виконанні маневру може призвести до зіткнення або промаху.
Аби наздогнати об’єкт, космічний апарат використовує контрінтуїтивний принцип орбітальної механіки. Це один із дивовижних парадоксів орбітального рандеву, адже, для того щоб наздогнати об’єкт на певній орбіті, космічному апарату, який його переслідує, знадобиться виконати маневр гальмування (так званий гальмівний імпульс). Різке зниження швидкості призведе до зменшення орбіти апарата, а як відомо, на нижчих орбітах об’єкт прискорюється під дією гравітаційного поля Землі. Тобто, космічний апарат, що наздоганяє, за ту саму одиницю часу буде здатний виконати більше навколоземних обертів, аніж об’єкт на вищій орбіті.
Отже, за контрінтуїтивним принципом орбітальної механіки, для того щоб наздогнати об’єкт, з яким належить провести стикування, треба добиратися до нього з нижчої орбіти. Саме тому всі орбітальні наближення здійснюють знизу догори, а не навпаки. Не тільки тому, що сам запуск виконується із Землі, але й з огляду на базові принципи орбітальної механіки. За аналогічним принципом відбувається й контрольоване “відставання” від об’єкта переслідування — раптом з якихось причин один апарат обігнав інший, з яким мав стикуватися, йому належить збільшити власну швидкість шляхом імпульсного запалювання двигунів. Таким чином він підніметься на вищу відносно свого об’єкта переслідування орбіту та дочекається, поки той його випередить, аби знову “впасти” на нижчу орбіту й повторити попередній етап контрольованого наближення.
Коли до цілі стикування залишатимуться десятки або сотні кілометрів, корабель-переслідувач перейде до підготовки до термінальної фази наближення (Terminal Phase Initiation). Це останній великий маневр наближення, коли обирається фінальна орбітальна траєкторія, що має призвести до зустрічі на однаковій орбітальній висоті.
Термінальна фаза наближення супроводжується етапом синхронізації орбіт обох космічних апаратів. Для точної навігації на цьому етапі, зокрема, залучаються супутникові навігаційні системи (GPS, Galileo, Beidou або ГЛОНАСС), ресурс яких завжди доповнюється системами радіолокації і лазерними далекомірами. А на пізніх етапах помічні й візуальні дані з оптичних камер спостереження назовні космічного апарата.
Фінальні етапи орбітального рандеву, коли до об’єкта стикування залишаються сотні й десятки метрів, передбачають вирівнювання відносної швидкості між космічними апаратами. В ідеальному сценарії наближення відносна швидкість має сягати нульового значення. Після досягнення цільової відстані починається етап утримання позиції (Station-keeping), під час якого важливе підтримання постійної відносної відстані та орієнтації космічних апаратів. Це фінальний етап орбітального рандеву — космічні апарати готуються до його кінцевої мети, стикування, утворюючи монолітне з’єднання двох або більшої кількості космічних апаратів на орбіті.
Перший досвід: безпечні та не дуже зв’язки на орбіті
Орбітальне стикування (Docking) — наступний етап після рандеву, що закінчується фізичним з’єднанням космічних апаратів. Розрізняють кілька основних типів стикування. Зокрема, це м’яке швартування, коли один апарат захоплюється роботизованою рукою та підтягується до іншого, та жорстке стикування, коли апарати за допомогою спеціальних пристроїв механічно об’єднуються герметизацією. Нещодавні напрацювання охоплюють розробку нових технологічних підходів і стандартів стикування, наприклад таких, що базуються на явищі електромагнетизму.
Перше орбітальне стикування пілотованого космічного корабля з автоматизованим апаратом відбулося у березні 1966 року під час місії Gemini 8. Корабель, який пілотували Ніл Армстронг і Девід Скотт, зміг здійснити контрольоване наближення та перше в історії стикування у космосі з безпілотною ракетою-мішенню Agena.
Щойно отямившись від ейфорії після першого успіху, астронавти помітили аномалію: через несправність двигуна космічного корабля почалося неконтрольоване обертання зв’язки Gemini—Agena. Утворилася пекельна центрифуга, яка й спонукала екіпаж корабля прийняти рішення щодо екстреного роз’єднання з Agena. Цей процес проходив у мануальному режимі через систему рульового управління. Коли вдалося від’єднатися від Agena, Gemini 8 здійснив аварійне приземлення. На щастя, його екіпаж залишився неушкодженим, от тільки присмак від першого успішного орбітального стикування був гірким.

Джерело: nasa.gov
У жовтні 1967 року перші успіхи в орбітальному стикуванні продемонстрував і Радянський Союз — відбулося автоматичне стикування двох космічних апаратів: “Космос-186” та “Космос-188”. Вже за півтора року СРСР зміцнив цей успіх першим в історії орбітальним стикуванням двох пілотованих космічних кораблів.
Спочатку 14 січня 1969 року в космос вирушив “Союз-4”, який пілотував космонавт Володимир Шаталов. За день після нього орбіти дістався “Союз-5” з трьома членами екіпажу: командиром Борисом Волиновим, бортовим інженером Олексієм Єлісєєвим та інженером-дослідником Євгеном Хруновим. “Союз-4” був активним кораблем, себто він проводив стикування, а “Союз-5” виконував роль пасивного космічного апарата. 16 січня 1969 року “Союз-4” здійснив автоматичне наближення до “Союз-5”. Коли до об’єкта стикування залишилося всього 100 м, Володимир Шаталов почав ручне управління космічним кораблем, після чого здійснив фінальний етап наближення та стиковку. Так була створена перша у світі населена орбітальна станція.
Історичне стикування та розстикування “Союз-4” і “Союз-5”:
Космічні кораблі були у зв’язці впродовж 4 годин та 35 хвилин. За цей час відбувся неймовірний вельми ризикований етап місії — пересадка космонавтів з одного корабля на інший. Тут, напевне, можна запитати: ну, що складного в тому, щоб перебратися через люк з одного корабля на інший? Звісно, здивування було б логічним, аби у тодішніх радянських “Союзів” цей перехідний люк існував. Та це було зовсім не так — переходити з одного корабля на інший космонавтам довелося через відкритий космос. Для цього Олексій Єлісєєв та Євген Хрунов, одягнені у скафандри “Ястреб”, протягом 37 хвилин повільно рухалися вздовж зовнішньої поверхні космічних кораблів, тримаючись за завбачливо встановлені конструкторами поручні. Зрештою подорож для обох успішно завершилася.
Дивовижно, але країна, аби провести одну з найскладніших на початок 1969 року космічних місій (до запуску Apollo 11 залишалося ще близько пів року), справді вирішила ризикнути життям двох космонавтів, замість приділити час проєктуванню перехідного люку. З іншого боку, тут важливо не втрачати контекст і пам’ятати, що космічні перегони між СРСР та США були передусім змаганням, в якому питання безпеки космічних екіпажів було другорядним. Вельми вірогідно, що проєктування подібного перехідного люку призвело б до затримки місії та ніколи б не дозволило СРСР стати першим у презентації орбітального стикування двох пілотованих космічних кораблів. Тоді кожна з таких космічних демонстрацій мала свій ризик та свою ціну, яку дві космічні держави, конкуруючи, не вагалися платити в якнайкоротші терміни.
Міцні обійми: різновиди стикувальних механізмів та майбутній розвиток технології
Далі поговоримо про те, що забезпечує надійність орбітального стикування, адже саме від цих механізмів залежить безпека екіпажу та вантажів. Розрізняють декілька основних механізмів для жорсткого стикування. Ми наведемо їх у хронологічному порядку впровадження:
- Зондово-конусний (Probe-and-Drogue) — це перший з розроблених механізмів для орбітального стикування, який був застосований, зокрема, на перших пілотованих космічних кораблях: радянському “Союзі” та американському Apollo. Принцип дії зондово-конусного механізму базується на взаємодії всього двох частин. Активна представлена зондом зі спеціальним штоком на кінці, який виступає механізмом захоплення. А пасивна частина оснащується конусоподібним отвором, в який для з’єднання має потрапити активний зонд. Під час початкового захоплення активний зонд входить у пасивний конус, після чого його захоплювачі чіпляються за виступи всередині отвору та міцно з’єднуються з ними. Далі спеціальна лебідка (іноді за допомогою маневрених двигунів) м’яко притягує космічні апарати один до одного, об’єднуючи їх. У момент максимального наближення відбувається жорстке замикання: спеціальні механізми (засувки, гаки, замки) фіксують стикувальні порти обох кораблів, забезпечуючи їхнє механічне єднання. Потім герметизацією вирівнюється тиск у шлюзі для безпечного пересування екіпажу або транспортування вантажів.

Джерело: i.sstatic.net
- Андрогінний периферичний стикувальний механізм (Androgynous Peripheral Attach System, APAS) — сучасний гнучкий тип стикувального механізму. “Андрогінний” в його назві означає, що обидва стикувальні вузли однакові й можуть грати як активну, так і пасивну роль. Тут немає окремого зонда і конуса; кожен порт може приймати або бути прийнятим. “Периферичний” означає, що механізми замикання розташовані по периметру стикувального порту. Під час кінцевого етапу наближення один порт висуває свої “пелюстки”, які захоплюють аналогічні “пелюстки” або “кільце” іншого порту, після чого відбувається автоматизоване вирівнювання обох космічних апаратів за допомогою сервоприводів або гідравлічних систем. Коли обидва модулі максимально притиснуті один до одного, починається етап жорсткого замикання: замки по периметру активуються, міцно фіксуючи стискувальні порти разом, далі слідує герметизація. APAS зарекомендував себе як найбільш універсальний стикувальний механізм, адже будь-який апарат з таким портом може стикуватися з іншим апаратом з таким же портом, що значно спрощує планування місій і дає космічним компаніям більшу гнучкість. Периферичне розташування механізмів також дозволяє зробити більший люк, що дійсно важливо для екіпажу в умовах космосу і допомагає переносити через шлюз габаритні вантажі. Пік використання APAS припав на 1980-ті та 1990-ті роки, коли ними оснащували американські космічні шатли. А з 2000 року подібні пристрої почали з’єднувати між собою модульну конструкцію орбітальної станції МКС (зокрема APAS-89/95).

Джерело: wikimedia.org
- Стикувальні механізми, засновані на стандартах NDS/IDSS (International Docking System Standard). Наразі це найновіший міжнародний стандарт стикувальних механізмів, розроблений задля сумісності між космічними кораблями різних країн і компаній у майбутньому. Це прямий розвиток андрогінних периферичних систем, який застосовує нові технологічні підходи, підвищену безпеку та надійність з’єднання. NDS/IDSS-сумісний стикувальний стандарт використовується на космічних кораблях SpaceX Crew Dragon, на довгобуді Boeing Starliner. Місячний космічний корабель NASA теж матиме стикувальний вузол, сумісний з NDS/IDSS.
- Магнітні або електромагнітні системи — найбільш новаторський підхід у орбітальному стикуванні, який передбачає використання контрольованих магнітних полів для взаємодії між двома космічними апаратами задля їхнього з’єднання. Для цього мають застосувати постійні магнітні пластини, електромагнітні пластини або вихрові струми (едді-струми). Це перший в історії не механічний різновид орбітального стикування, який пропонується розробити. А значить, електромагнітні стикувальні системи не будуть схильні до механічного зносу, що відбувається із наведеними вище типами механізмів. Етап початкового наближення буде, як і раніше, відбуватися за допомогою звичайних маневрених двигунів. Але коли космічні апарати опинятимуться на відстані кількох метрів один від одного, активуються електромагніти, які забезпечать між ними кероване магнітне поле. Спочатку це поле вирівняє та синхронізує обертання космічних апаратів відносно один одного, а потім сприятиме їхньому м’якому стикуванню. Основна перевага, що гарантує підвищену м’якість стикування, полягає у самій фізиці електромагнетизму — якщо швидкість наближення буде надто високою, електромагніти утворять ефект демпфування, використовуючи вихрові струми для гальмування. Попри те, що наближення відбуватиметься завдяки взаємодії з магнітним полем, кінцеве утримання, як і раніше, забезпечуватимуть механічні замки (подібні до тих, що на APAS або NDS).
Наразі електромагнітні системи для стикування — на фінальному етапі розробки. Невдовзі їх мають продемонструвати приватні космічні компанії — зокрема спільна місія D-Orbit та Starfish Space, про яку ми розповідали вище, якраз може увійти в історію як перша демонстрація подібного типу стикування.

Джерело: spacenews.com
Використання електромагнітних сил у майбутніх космічних місіях допоможе суттєво здешевити виробництво стикувальних вузлів і забезпечити більш м’яке захоплення космічних апаратів з можливістю дистанційного керування процесом. Наразі нова технологія гарантує не тільки багато переваг, але й прогнозовано стикається з низкою труднощів. Серед них ключові: велике споживання енергії, складність реалізації та екранування інших електричних систем космічного корабля, адже тривала дія сильних магнітних полів загрожує вивести із ладу його електрообладнання. Зовсім скоро ми з’ясуємо, чи вдалося впоратися із цими викликами D-Orbit та Starfish Space.
Космічна рука допомоги: роботизовані маніпулятори для м’якого стикування
Розглянуті вище стикувальні механізми та нові типи електромагнітних стикувальних систем проєктувалися для жорстких типів стикування, коли два космічні апарати міцно з’єднуються замками та герметизують тиск, роблячи простір всередині безпечним для пересування екіпажу. Проте існують космічні апарати без власних стикувальних портів, тому для їхнього захоплення оптимальні методи м’якого стикування, передусім із залученням роботизованих маніпуляторів.
Зовнішня роботизована рука-маніпулятор, яку найчастіше можна побачити на орбітальних станціях, захоплює космічний апарат і переміщує його до спеціального стикувального порту, де відбувається жорстка фіксація. На відміну від жорсткого стикування, коли обидва космічні апарати постійно маневрують, такий тип м’якого приєднання здебільшого називають орбітальним швартуванням (Berthing). Подібний процес за своєю суттю є менш динамічним, адже космічний апарат, що приєднується, є пасивним і повністю залежить від зовнішньої роботизованої руки.
Першою роботизованою рукою-маніпулятором стала Canadarm (Shuttle Remote Manipulator System, SRMS), розроблена Канадою. Canadarm вперше випробувано в космосі на борту шатла Columbia під час місії STS-2 у листопаді 1981 року. Рука завдовжки близько 15,2 м складалася з шести суглобів, що забезпечувало шість ступенів свободи руху. Маніпулятор мав на кінці ефектор (End Effector) — механізм, здатний захоплювати корисні вантажі, на яких заздалегідь встановили для цього спеціальні кріплення.
На ранньому етапі розробки керування маніпулятором відбувалося в ручному режимі оператором-астронавтом, який використовував камери на руці та власні візуальні підказки для захоплення об’єкта. Після захоплення Canadarm або виводила космічний апарат з вантажного відсіку човна (у разі розгортання), або туди його повертала. Canadarm зіграла вирішальну роль на початковому етапі будівництва МКС. Саме нею переміщували великі модулі та ферми з вантажного відсіку шатла. Іноді працювали одразу дві роботизовані руки (Canadarm та Canadarm2).

Джерело: wikimedia.org
За роки роботи доставлена на МКС у квітні 2001 року Canadarm2 — нова, довша (17,6 м) модифікація першого маніпулятора на семи рухомих суглобах — допомогла захопити такі типи непілотованих космічних кораблів, як японський HTV (H-II Transfer Vehicle), американський SpaceX Dragon першого покоління, а також Northrop Grumman Cygnus. Після захоплення маніпулятором вантажні кораблі переносили у спеціальну зону під назвою Common Berthing Mechanism (CBM), де 16 автоматичних моторизованих болтів міцно притискали їх до зовнішнього корпусу станції, забезпечуючи жорстке герметичне швартування. Пізніше серію маніпуляторів Canadarm доповнила третя модифікація зі схожим функціоналом.
У 2008 році Японія також розгорнула на МКС свою власну роботизовану руку-маніпулятор — JEMRMS (Japanese Experiment Module Remote Manipulator System). Встановлена на японському експериментальному модулі Kibo, на відміну від попередників, JEMRMS була системою одразу з двох роботизованих рук: головна була завдовжки 9,9 м, а мала — 1,7 м. Перша рука використовувалася для захоплення та роботи із габаритними об’єктами, тоді як у меншої був вищий показник точності, тож її залучали до роботи із малими об’єктами, що потребувало ювелірної майстерності.

Джерело: picryl.com
Роботизовані JEMRMS ніколи не швартували великі космічні кораблі до МКС, натомість вони переміщали експериментальні платформи та окремі експерименти з герметичного модуля Kibo на його зовнішню платформу — Exposed Facility.
Остання зі встановлених на МКС роботизованих рук була розгорнута у липні 2021 року. European Robotic Arm (ERA), маючи довжину 11,3 м і сім рухомих суглобів, залишається єдиною рукою, здатною обслуговувати російський сегмент орбітальної станції. Новаторство ERA полягає ще й у тому, що це єдиний роботизований маніпулятор, який може переміщатися зовнішньою поверхнею станції, закріплюючись у 11 базових точках фіксації на вимогу оператора. ERA також є універсальною рукою, оскільки обидва її “зап’ястя” з різних боків мають однакову функціональність та можуть бути як кінцевими ефекторами, так і місцями кріплення до поверхні МКС.
Варто зазначити, що на сьогодні активно розробляються нові типи роботизованих маніпуляторів, направлені на підвищений рівень автономності завдяки залученню алгоритмів машинного навчання у процес їхнього функціонування. ШІ дозволить роботам приймати рішення у реальному часі щодо послідовності дій, вибору інструментів та реагування на непередбачені ситуації. Наразі подібні напрацювання представлені японським стартапом GITAI, який уже тестує автономні дворукі системи (S2 на МКС). Передбачається, що функціонал розробки вийде далеко за межі МКС та може бути встановлений на сервісні космічні апарати, які займатимуться обслуговуванням, дозаправкою та модифікацією супутників на орбіті.
У межах розширення функціоналу роботизованих маніпуляторів наразі пропонується створення нових маніпуляторів із підвищеною спритністю та вмінням працювати з дрібними деталями, випуск модульних та реконфігурованих рук на кшталт ERA на МКС. Є й напрацювання у сфері м’якої робототехніки (Soft robotics) — йдеться про нові типи роботів з гнучких матеріалів і структур, а також проєктування невеликих роботизованих маніпуляторів-помічників, так званих коботів (колаборативні роботи). Останній тип буде вкрай незамінним у колонізаторських місіях на інші планети, коли роботизовані руки працюватимуть у прямій зв’язці з астронавтом-людиною для допомоги у будівництві та інших типах рутинних завдань.
Proba-3: орбітальне рандеву тривалістю два роки
Як йшлося вище, зазвичай орбітальне рандеву завершується стикуванням двох космічних апаратів. Однак існують космічні місії специфічного профілю, які для певних завдань вимагають від космічних апаратів постійно перебувати у стані рандеву — на однаковій відстані один від одного.
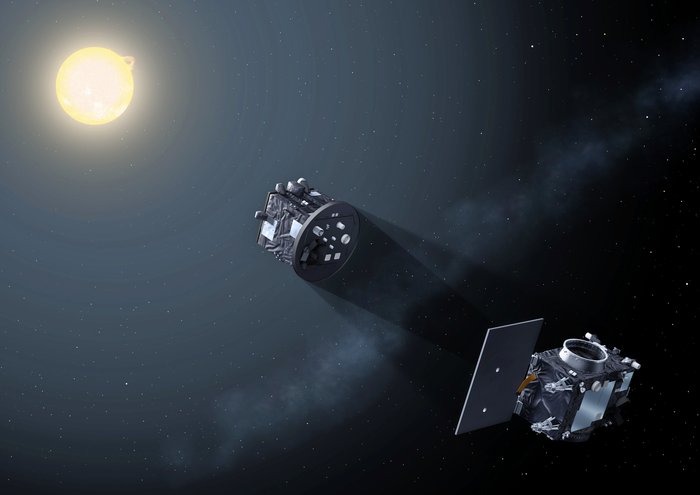
Саме так працює сонячна обсерваторія Proba-3, організована та запущена Європейським космічним агентством (ESA) у травні 2024 року. Ця космічна місія складається із двох апаратів на високій еліптичній орбіті (HEO). Один із них, коронографний супутник (Coronagraph Spacecraft), оснащено головним науковим інструментом місії — коронографом для дослідження Сонця. Інший, так званий затемнювальний супутник (Occulter Spacecraft), служить для постійного штучного затінення, аби коронограф не сліпило пряме сонячне світло. Для цього його обладнано спеціальним диском, який і блокує світло від Сонця, імітуючи сонячне затемнення.
Джерело: spaceflightnow.com
Для того щоб затемнення завжди було повним, супутникам слід бути на сталій відстані один від одного (144 м/с). Цей стан постійного орбітального рандеву, у якому перебувають обидва супутники, вимагає від команди місії Probe-3 надчутливих приладів космічної навігації, позиціонування та часу. Номінальна тривалість експерименту Proba-3 становить два роки, але, як це часто відбувається із вдалими космічними місіями, її можуть продовжити.
Хоча існують й інші місії, які використовують внутрішні коронографи, а також місії з кількома космічними апаратами, які спостерігають Сонце з різних кутів (SOHO, STEREO), Proba-3 унікальна саме завдяки двом окремим апаратам у постійному прецизійному рандеву. Вона наочно демонструє, як орбітальне рандеву залишається одним із найвагоміших аспектів космічної діяльності не тільки в питанні орбітального будівництва та логістики, але й у наукових дослідженнях.