
Супутникові зображення відіграють провідну роль у питаннях обізнаності та спостереження за Землею. Навіть прості двовимірні знімки надають великий обсяг інформації щодо досліджуваного об’єкта, особливо за умови використання додаткових спектральних фільтрів під час кінцевої обробки оптичного зображення.
Та плине час, і технологія крокує з ним у ногу. Активне впровадження супутникових сузір’їв і стрибок у розвитку автоматизованих систем на базі машинного навчання посилили потенціал дистанційного спостереження за Землею, який базується переважно на отриманні пласких фотознімків поверхні з їх подальшою обробкою.
Сьогодні з’ясовуємо, наскільки близько ми до тривимірної супутникової візуалізації поверхні Землі у реальному часі, та які переваги вона принесе людству.
Типи сенсорного спостереження
Насправді оптична супутникова зйомка — не єдиний спосіб, в який зручно дистанційно зондувати Землю. Більш ширший набір даних про спостережувану ділянку земної поверхні можна отримати за допомогою розширення діапазону електромагнітного сканування.
Зауважимо, фотознімок — всього лиш відбиток фотонного випромінювання сонячного світла, що потрапляє на оптичний сенсор камери, залишаючись на ньому як миттєвість. Але світло — це тільки видима частка великого обсягу хвильової енергії, що оточує нас у Всесвіті. Ширші можливості для сканування відкриває використання сканера у радіо, мікрохвильовому, інфрачервоному, ультрафіолетовому, лазерному діапазоні тощо.
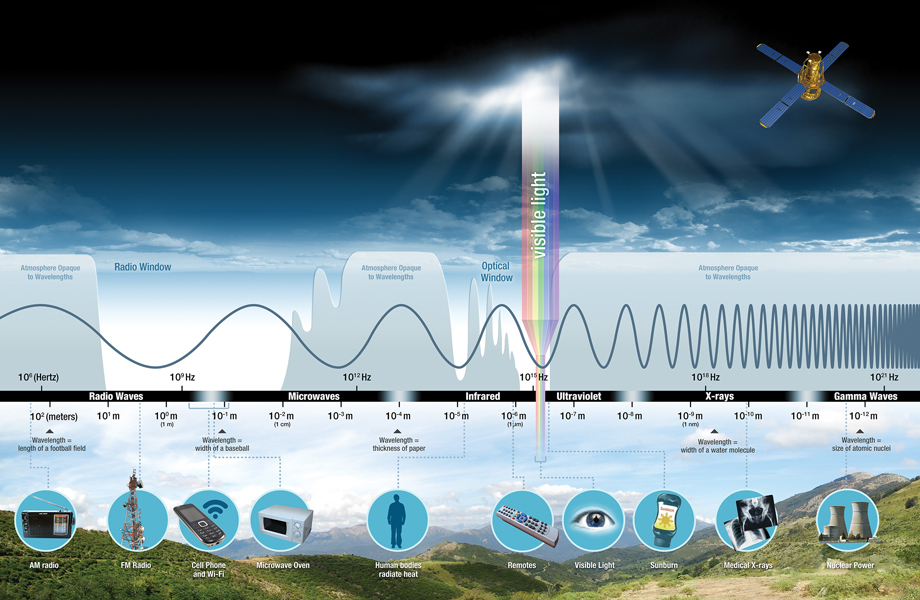
Зображення: NASA Science
Насправді всі ці методи по суті схожі один на одного, адже вони працюють за принципом далекоміра. Так, спочатку супутник надсилає електромагнітний сигнал на поверхню Землі, стикаючись із якою, той відбивається та надходить назад на приймальний сенсор супутника. Вимірювання часової різниці, з якою той або інший відбитий сигнал повертається на сенсор супутника, допомагає отримати точну топографічну карту місцевості з урахуванням рівня висот.
Основною відмінністю в цих методологіях залишається довжина хвилі — деякі з них, як-от фотонне випромінювання світла, не здатні проходити крізь водяну пару або хмари в атмосфері, інші ж легко долають бар’єр, відбиваючись від щільніших структур (наприклад, від земної поверхні). Саме мікрохвильове випромінювання супутників із синтезованою апертурою (SAR) дозволяє проводити дистанційний моніторинг Землі навіть за умов хмарності або відсутності сонячного освітлення.
Такі спектральні зображення мають сенс і у полі глобальних ринків, де точні дані про висоту місцевості надзвичайно важливі. Значну бенефіцію від використання 3D-моделей рельєфу отримають компанії з розвідки корисних копалин, глибинних покладів нафти й газу. Своє застосування технологія знайде й у будівельному секторі, де точна топографія місцевості необхідна ще на етапі проєктних робіт.
Можливості спектральної 3D-візуалізації
Деякі новітні методи супутникового сканування володіють інструментами, що дозволяють відійти від отримання звичайного 2D-зображення, які пропонувала оптична фотозйомка. Зокрема, такі спроможності має оптична технологія LiDAR (Light Detection and Ranging), що, як і SAR, надала концептуально нове бачення візуалізації об’єкта сканування.
Це бачення ґрунтувалося на самому принципі дії технології LiDAR: спочатку лазерний сканер надсилає короткі імпульсні промені, які, відбиваючись від сканованої поверхні, повертаються на приймальну станцію. На кшталт дії SAR, дистанція до об’єкта визначається проміжком часу, за який випущений лазерний промінь повертається на приймач. Тільки за один цикл випромінювання та прийому на сенсор записується у вигляді точок ціла хмара даних.
Зображення: usgs.gov
LiDAR і різні типи SAR-радарів дозволили побачити об’єкти на принципово іншому рівні сприйняття. Це своєрідне “бачення без зору” також мало певну можливість покращення точності вимірювальних даних шляхом повторних прольотів сканера над зоною інтересу (сканування місцевості під різним кутом дозволяло позбутися сліпих зон та удосконалити зображення за допомогою DEM та інших моделей).
Зона застосування LiDAR-систем швидко розширилася — сьогодні їх можна зустріти на літаках, дронах, висотних стратостатах і супутниках. Використання лазерів вирвалося і за межі дослідження Землі. Технологію застосували у оптичній системі FASOR (Frequency addition source of optical radiation) — направленого космічного лазера, за допомогою якого Дослідницька лабораторія ВПС США (US Air Force Research Laboratory) проводить експерименти зі створення штучної “лазерної зірки напряму“.

Фото: U.S. Air Force.
Створення штучного сяйва “лазерної зірки напряму” досягається шляхом направлення лазера (або групи лазерів) у атмосферу. Промені сходяться в одній точці простору та утворюють штучне сяйво. Така штучна зоря на нічному небі використовується системами адаптивної оптики на великих відстанях для створення ефекту викривлення від світла та кращого фокусу на об’єктах глибокого космосу.
Утім, повернімося до можливостей мапінгу, які відкривають лідари і радари. Для картографування ландшафту поверхні супутників, астероїдів і планет Сонячної системи також використовують супутникові LiDAR та SAR-системи. Інноваційний підхід у створенні тривимірної топографічної обізнаності пропонується навіть для майбутніх місячних місій.
На базі технології першого в світі 4D LiDAR Aeries ™ II (три просторові виміри + час) від компанії Aeva NASA розробляє картографічний наплічник Kinematic Navigation and Cartography Knapsack (KNaCK), оснащений LiDAR-станцією. В режимі реального часу KNaCK здатен надавати астронавту повну тривимірну мапу середовища, що його оточує, за допомогою вимірювання доплерівського зсуву відбитого лазерного сигналу.
Це досягається за рахунок того, що 4D LiDAR від Aeva надсилає лазер з частотно-модульованою безперервною хвилею (FMCW), тобто, здатен оновлювати інформацію про навколишнє середовище з мізерною затримкою у часі. Це стане у великій пригоді під час використання станції у позаземних умовах, де відсутнє GPS aбо GNSS-покриття.
Джерело: NASA
Отже, радари, лідари та інші типи сенсорів добре зарекомендували себе для первинного виміру топології висот поверхні. Оперуючи у своїх зонах відповідальності, ці супутники поступово оновлюють висотні дані, які потім посилюють додатковими спостереженнями із Землі. Так створюються основні бази даних висот земної поверхні, багато з яких сьогодні можна знайти у відкритому доступі.
Але справжня магія починається на етапі побудови об’ємної тривимірної моделі спостережуваної зони, яка комбінує в собі висотні дані про поверхню та оптичні супутникові фотознімки з різною роздільною здатністю.
Додатковий вимір для фотозображень
Ви, певно, знайомі з такими сервісами, як Google Earth, де користувачеві надається доступ до мільйонів супутникових та аерофотознімків Землі, які при масштабуванні можна переглядати у повноцінному 3D. Це стає можливим завдяки використанню складних цифрових моделей рельєфу (DEM), чиї алгоритми дають повну тривимірну мапу ландшафту, що базується на даних супутникового спостереження.
При виготовленні цифрової моделі рельєфу використовується одразу кілька методів, деякі з яких базуються на явищі стереоскопії — штучного поглиблення звичайного 2D-зображення. Наявні системи на базі штучного інтелекту (ШІ) здатні створити повністю тривимірну модель, спираючись виключно на супутникові знімки й актуальні дані щодо висот ділянки, обраної для цифрового моделювання. Зазначимо, що на це були спроможні і DEM попередніх генерацій, проте з вагомим залученням людського ресурсу у процес моделювання та зі значно більшими витратами часу.
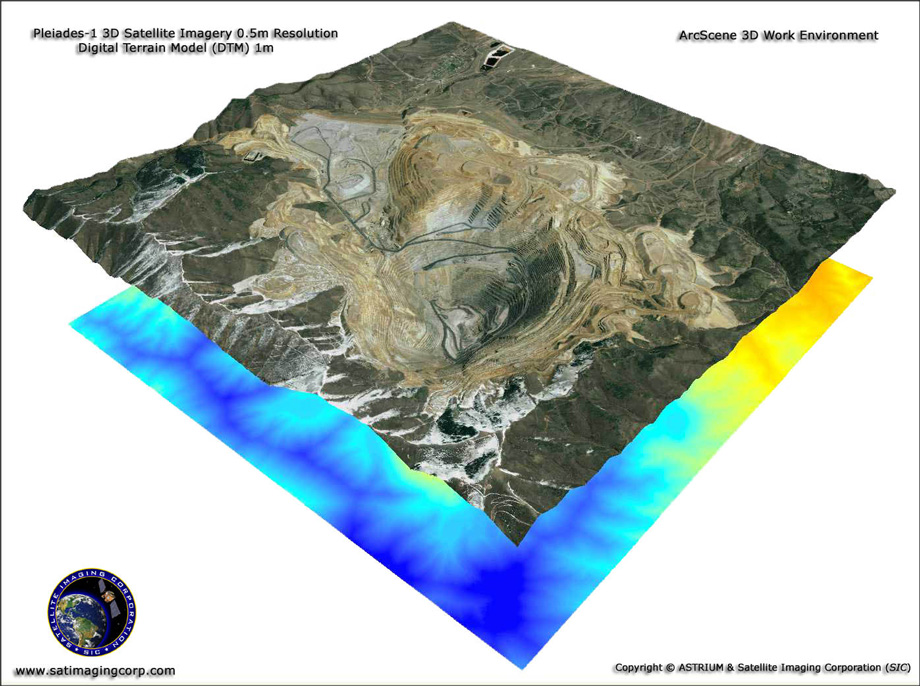
Зображення: satimagingcorp.com
Окрім зростання фактора систем ШІ, ще однією обставиною, що дозволяє підвищити швидкість оновлення інформації, є використання супутникових сузір’їв цільового призначення. Супутники, які працюють в межах свого угруповання, здатні зосереджуватися на одній зоні інтересу та здійснювати сканування об’єктів під різними кутами нахилу сенсора до поверхні Землі. Це прогнозовано надає більше інформації стосовно рівня висот та інших топологічних особливостей рельєфу. Супутникові сузір’я також значно розширюють свою зону охоплення, щоб доволі швидко оновлювати дані сканування. Це вельми корисно у разі швидкоплинних надзвичайних ситуацій техногенного або природного характеру.
До створення тривимірних моделей ландшафту все частіше залучають й методи комбінованого спостереження, в якому дані супутникового зондування земної поверхні розширюються за допомогою даних повторного сканування з бортів безпілотних літальних апаратів (БПЛА). Така багатовимірна архітектура істотно підвищує стійкість подібних систем, пропонуючи надзвичайний рівень обізнаності при повторному скануванні окремих ділянок за допомогою дронів.
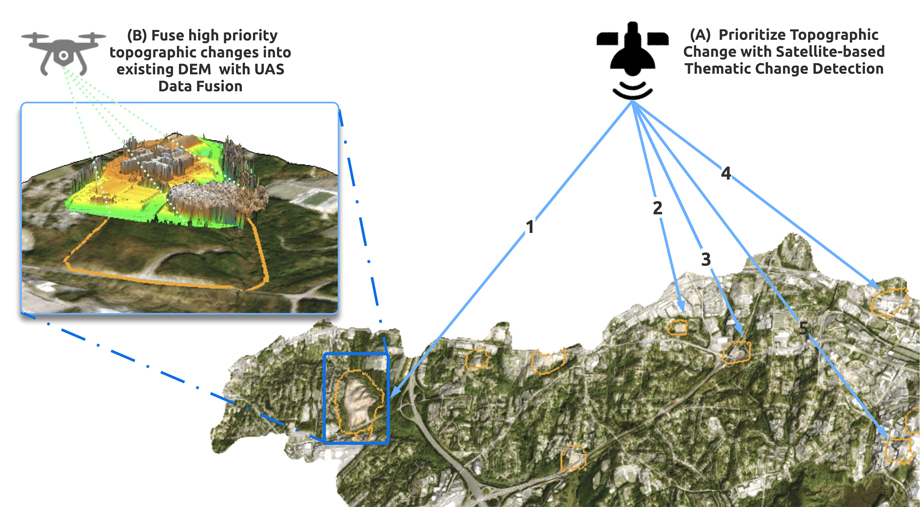
Зображення: mdpi.com
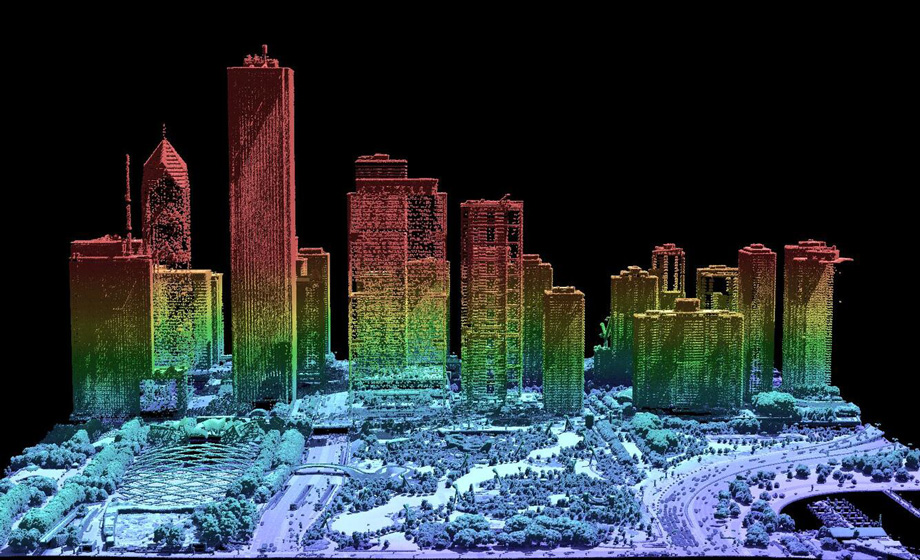
Як бачимо, навіть найточніші дані першочергового спектрального аналізу потребують додаткової обробки за допомогою методів цифрового моделювання. Чимало з них сьогодні уже працюють з підключенням багаторакурсних стерео (MVS) нейронних мереж, що пришвидшує побудову тривимірної мапи. Подібні мережі здатні оцінювати мапи висот із супутникових зображень та переносити їх у вигляді 3D-точки в системі координат для створення цифрової моделі поверхні (DSM) або цифрової моделі рельєфу (DEM).
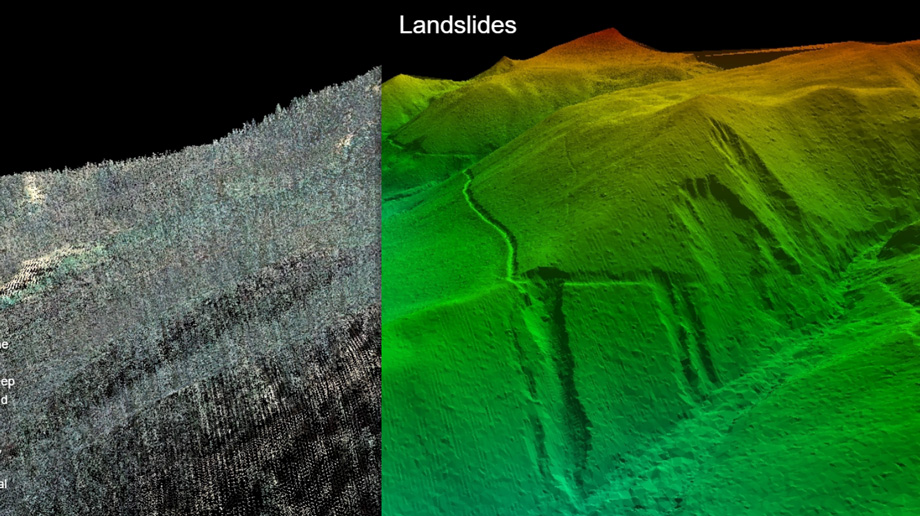
Одна з найбільш цікавих (в контексті нашої розповіді) цифрових моделей рельєфу має назву 3D Elevation Program (3DEP). Вона була розроблена у 2012 році та керується Національною геопросторовою програмою Геологічної служби США (USGS). Модель 3DEP постійно оновлюється і взаємодіє з низкою топологічних баз даних, серед яких дані від Національної розширеної оцінки рельєфу (NEEA), а також Стандарти та специфікації Національної геопросторової програми (USGS).
Починаючи з 2020 року, 3DEP переведено у формат хмарного сховища — Cloud Optimized Geotiff (COG), що суттєво знизило рівень обчислювальних навантажень та полегшує взаємодію з кінцевим користувачем. Моделювання 3DEP використовується тільки для регіону США.
Отримана завдяки LiDAR
Зображення: usgs.gov
Великий потенціал нових систем тривимірної обізнаності розкривається і при картографуванні ландшафту на інших планетах, таких як Марс, де за допомогою параметрів супутникового зображення можна скласти інтерактивні мапи. Для створення 3D-мап шляхом аналізу моделей потужності сигналу та оцінки висоти будівель можна використовувати навіть Глобальну навігаційну супутникову систему (GNSS).
Супутникові стереозображення особливо важливі для глобальних ринків, де точні дані щодо висоти недоступні через недостатнє покриття іншими геопросторовими сервісами. Багато комерційних ринків отримають вигоду від 3D-цифрових моделей рельєфу, що включають мапи для розвідки нафти та газу, найбільш зручні ділянки для видобутку корисних копалин, проєктування та будівництва, міського планування, екологічного моніторингу, сільського і лісового господарства. Деякі сервіси з 3D-мапування Землі пропонують своїм користувачам ознайомитися з більш профільними речами, зокрема сервіс Earth 3D Map містить найдетальнішу мапу землетрусів.
Технології тривимірного картографування Землі сьогодні переживають своє нове народження. Нові методи побудови тривимірних моделей ландшафту використовуються повсюдно: починаючи із Землі та закінчуючи картографуванням інших планет. Особливо цінною технологія залишається в умовах відсутності GPS та GNSS-покриття, де навіть портативні наземні сенсори здатні зробити повноцінну тривимірну мапу навколишнього середовища.



